arduino NANO による赤外線コントロールカー
赤外線リモコンによる制御を試したくて、ロボットかーのコントロールを試してみた。条件は以下のとおり。
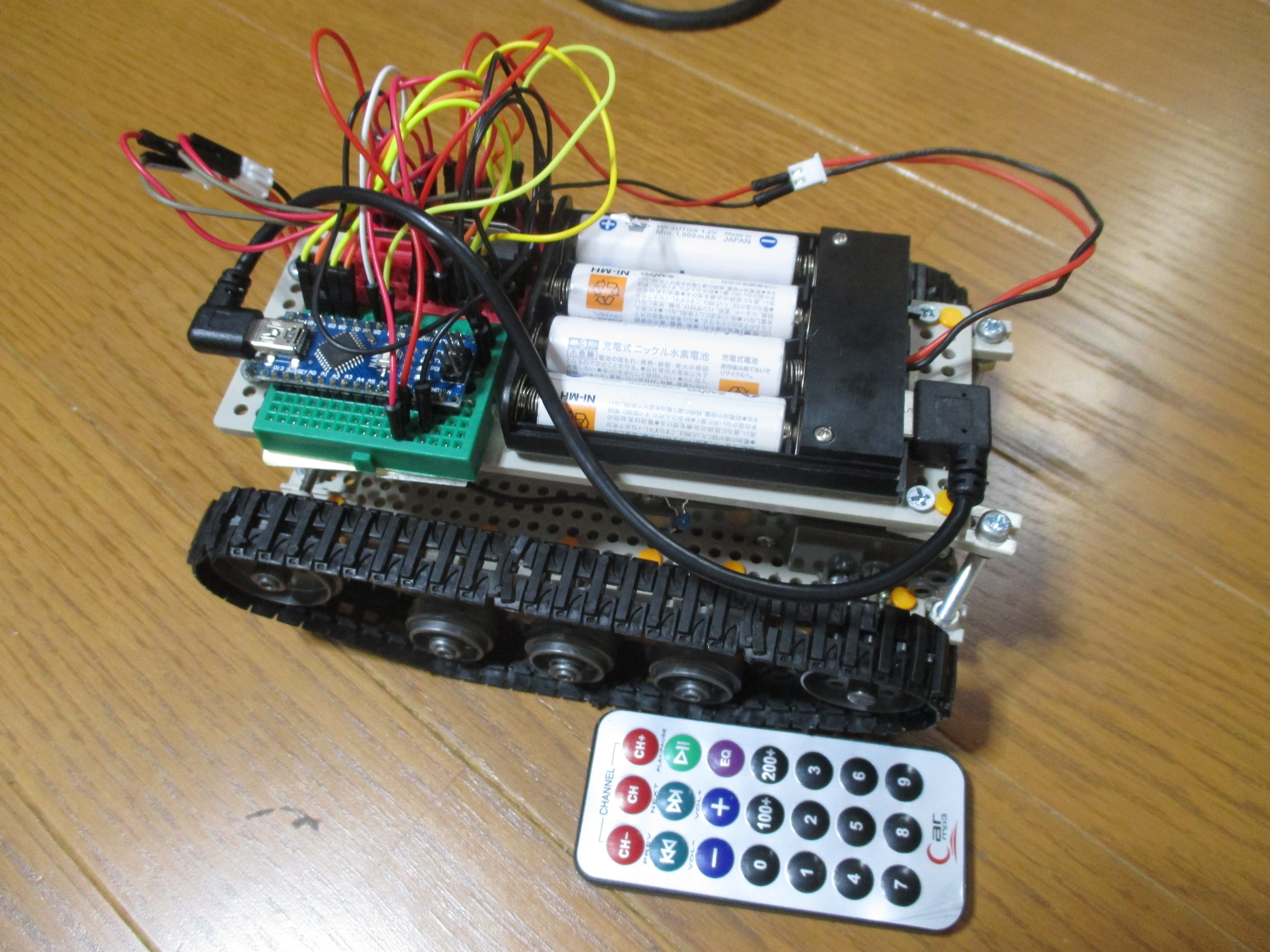
- ロボットカー本体はこれまで色々試してきた田宮のキャタピラーベース車に台を付けたもの。、モーターコントロールは東芝のTA7291を2個使用
- リモコンは osoyooの ラズパイスターターキットにはいっていたものを使用
- CPUはarduino NANO を使用
- 車の電源は単三電池四本を使用(実は空気電池四本計5.2V)
操作は、前進ボタン(2)で1秒間前進、後退ボタン(8)で1秒間後退、左右ボタン(4と6)で0.5秒間)動いた後停止する。
さらに動かしたい場合は再度ボタンを押す。リモコンは押し続けても信号の連続送出はしないため、連続操作は出来ない。必ず一操作後停止する。
Programは以下の通りである。
#include "configuration-Ver2.h"
#include
int For = 16718055; //2
int Left = 16716015; //4
int Right = 16734885; //6
int Back = 16730805; //8
int RECV_PIN = 6;
IRrecv irrecv(RECV_PIN);
decode_results results;
void go_Advance() //Forward
{
digitalWrite(dir1PinL, HIGH);
digitalWrite(dir2PinL,LOW);
digitalWrite(dir1PinR,HIGH);
digitalWrite(dir2PinR,LOW);
}
void go_Left() //Turn left
{
digitalWrite(dir1PinL, HIGH);
digitalWrite(dir2PinL,LOW);
digitalWrite(dir1PinR,LOW);
digitalWrite(dir2PinR,HIGH);
}
void go_Right() //Turn right
{
digitalWrite(dir1PinL, LOW);
digitalWrite(dir2PinL,HIGH);
digitalWrite(dir1PinR,HIGH);
digitalWrite(dir2PinR,LOW);
}
void go_Back() //Reverse
{
digitalWrite(dir1PinL, LOW);
digitalWrite(dir2PinL,HIGH);
digitalWrite(dir1PinR,LOW);
digitalWrite(dir2PinR,HIGH);
}
void stop_Stop() //Stop
{
digitalWrite(dir1PinL, LOW);
digitalWrite(dir2PinL,LOW);
digitalWrite(dir1PinR,LOW);
digitalWrite(dir2PinR,LOW);
}
void setup()
{
Serial.begin(115200);
// In case the interrupt driver crashes on setup, give a clue
// to the user what's going on.
Serial.println("Enabling IRin");
irrecv.enableIRIn(); // Start the receiver
Serial.println("Enabled IRin");
/* pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, LOW); */
}
void loop() {
if (irrecv.decode(&results)) {
Serial.println(results.value, HEX);
switch (results.value) {
case 16718055:
go_Advance(); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
stop_Stop();
break;
case 16716015:
go_Left(); // turn the LED on (HIGH is the voltage level)
delay(500); // wait for a second
stop_Stop();
break;
case 16734885:
go_Right() ; // turn the LED on (HIGH is the voltage level)
delay(500); // wait for a second
stop_Stop();
break;
case 16730805:
go_Back(); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
stop_Stop();
break;
}
irrecv.resume(); // Receive the next value
}
delay(100);
}
------------------------------------------------------------------------------------
configuration-Ver2.h 今回使っていない定義も入っている。
/*Declare L298N Dual H-Bridge Motor Controller directly since there is not a library to load.*/
//Define L298N Dual H-Bridge Motor Controller Pins
#define dir1PinL 12 //Motor direction
#define dir2PinL 11 //Motor direction
//#define speedPinL 6 // Needs to be a PWM pin to be able to control motor speed
#define dir1PinR 10 //Motor direction
#define dir2PinR 9 //Motor direction
#define dirRIFor 2 //remocon number 2
#define dirRILeft 3 //remocon number 4
#define dirRIRight 4 //remocon number 6
#define dirRIBack 5 //remocon number 8
#define SPEED 150 //both sides of the motor speed
int leftscanval, centerscanval, rightscanval, ldiagonalscanval, rdiagonalscanval;
const int distancelimit = 30; //distance limit for obstacles in front
const int sidedistancelimit = 30; //minimum distance in cm to obstacles at both sides (the car will allow a shorter distance sideways)
int distance;
int numcycles = 0;
const int turntime = 800; //Time the robot spends turning (miliseconds)
int thereis;
#define BARRIER 30 // 障害物までの距離
#define BARRIER1 10 // 障害物までの距離(至近距離)
// 移動時間の定義
#define T_MOVE 500
//#define T_MOVE 1000
#define T_BACK 300
#define T_LEFT 300 // 左へ90度回転
#define T_RIGHT 300 // 右へ90度回転
#define DELAY 10
#define T_STOP 300
#define OK 0
#define NG 1